Monocular Depth Estimation
Developed a lightweight monocular depth estimation model using a simplified encoder-decoder architecture, achieving real-time inference at 30 FPS on a Jetson Orin NX with an MIPI camera. 

Developed a lightweight monocular depth estimation model using a simplified encoder-decoder architecture, achieving real-time inference at 30 FPS on a Jetson Orin NX with an MIPI camera.
A semi-autonomous litter-cleaning robot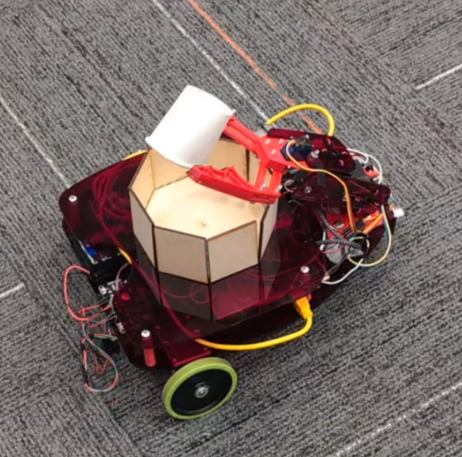
In this project we develop an Unscented Kalman Filter (UKF) for our IMU driven quadcopter model to fuse the inertial data and the vision-based pose and velocity estimation. 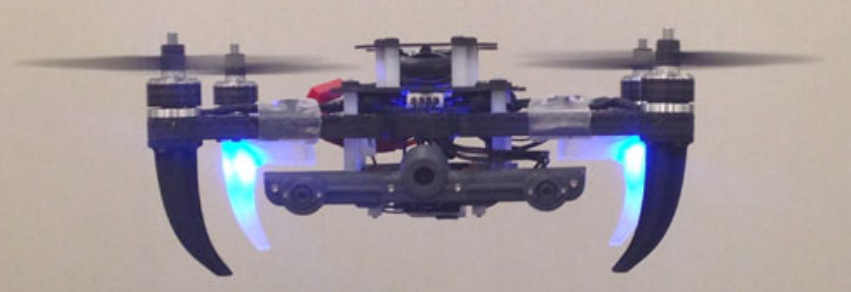
Designed and benchmarked control architectures (PID, LQR, MPC, and Geometric Controller) for a quadcopter operating in variable windfields, modeling wind disturbances as Gaussian noise and accounting for aerodynamic drag at cruising speeds of 1–5 m/s.