Monocular Depth Estimation
A semi-autonomous litter-cleaning robot

A semi-autonomous litter-cleaning robot
A semi-autonomous litter-cleaning robot
In this project we develop an Unscented Kalman Filter (UKF) for our IMU driven quadcopter model to fuse the inertial data and the vision-based pose and velocity estimation. 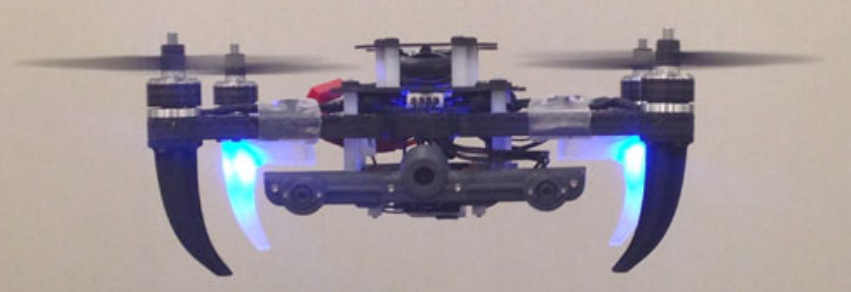
Designed and benchmarked control architectures (PID, LQR, MPC, and Geometric Controller) for a quadcopter operating in variable windfields, modeling wind disturbances as Gaussian noise and accounting for aerodynamic drag at cruising speeds of 1–5 m/s. 
Published in International Conference on Mechanical Design and Manufacturing (ICMDM), 2023
In this paper, we provide a comprehensive review of driving strategies for perception, prediction, and control, particularly emphasizing recent advances in deep learning-based approaches. We also discuss the benefits and limitations of each approach and highlight areas for future research.
Recommended citation: R. Verma, J. Phillip, M. Kotambkar. "2023 From Concept to Reality: An In-Depth Review of Autonomous Driving Strategies and Their Implementation" International Conference on Mechanical Design and Manufacturing 2023.
Download Paper
Published in IEEE International Conference on Robotics and Automation (ICRA), 2025
The goal is to enable an agile aerial vehicle with an RGBD sensor to navigate safely from start to goal in unknown, dynamic environments. Our method combines nonlinear model predictive control with adaptive control barrier functions, directly linking perception-driven constraints to real-time planning and control
Recommended citation: A. Saviolo, N. Picello, J. Mao, R. Verma and G. Loianno, "Reactive Collision Avoidance for Safe Agile Navigation," 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2025, pp. 16125-16132, doi: 10.1109/ICRA55743.2025.11127284.
Download Paper
Workshop, Visvesvaraya National Institute of Technology, 2021
Graduate Course, Tandon School of Engineering, Department of Mechanical Engineering and Aerospace, 2024