State Estimation and Optical Flow based Tracking of a Quadrotor
- Developed a Vision based Pose and Velocity Estimation system for a quadcopter in indoor environment.
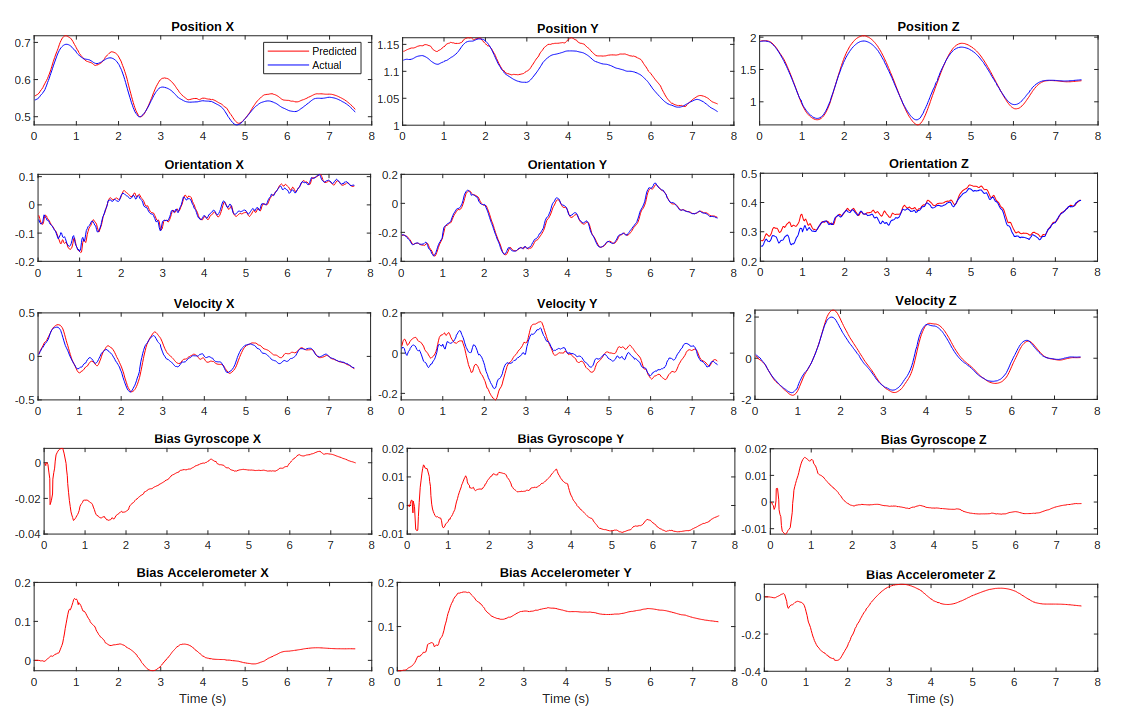
- Implemented Unscented Kalman Filter for State Estimation of a Quadcopter to capture non-linearity more accurately.